Theory of Vibration
The response of a machine foundation is generally analyzed by Lumped Parameter Approach. In this approach the foundation is represented quite well by a mass, spring and a dash-pot and the problems are usually studied under following headings.
- Free vibration of a mass spring system without damping
- Free Vibration of a mass spring system with damping
- Forced vibration of a mass spring system without damping
- Forced vibration of a mass spring system with damping
The properties of Simple Harmonic Motion are to be understood clearly to make the above studies.
Simple Harmonic Motion
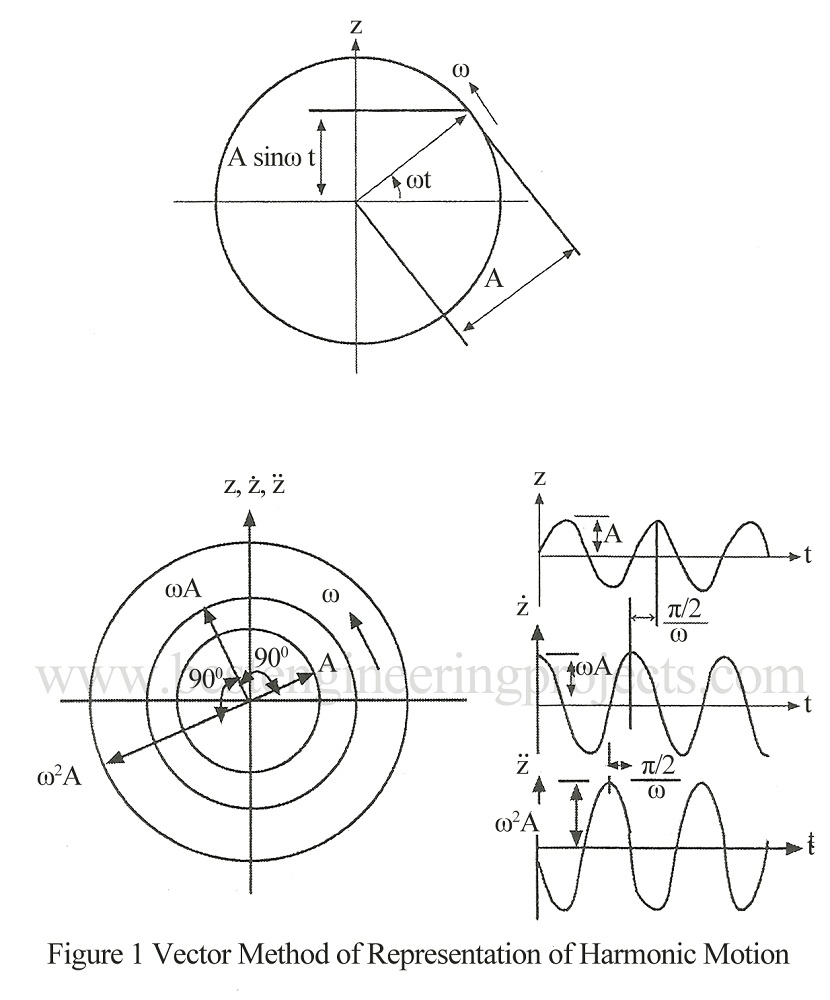
In simple harmonic motion acceleration is proportional to displacement from some fixed point. A weight suspended to a spring as shown Fig.1 is a simple example of such motion. The spring in Fig.1 is assumed to have a spring constant, k. A weight, W, is suspended at the bottom end of the spring. The weight W produces a static deflection of zst and a static position of equilibrium is achieved in position OO. The system is then set into vertical motion by pulling down from the position static equilibrium OO, and then released. As a result, the weight W oscillates about OO, undamped. The maximum displacement zmax from the position OO is called the amplitude A. The total maximum displacement is 2A and is called double amplitude. This phenomenon is illustrated in Fig.1 (a) to (e). At any time t the displacement achieved is z. This phenomenon of vertical oscillation can be illustrated graphically. Consider a circle with center at O and of radius zmax [Fig 1 (g)].

A particle is allowed to move around the circle with an angular velocity ω. At any time’t’ the position of the particle is at ‘a’. If a projection of particle at different time in a vertical diameter of the circle is made, the particle will be oscillating from its equilibrium position O to ‘a’, ‘a’ to O, O to ‘b’ and ‘b’ to O in one complete revolution. A time displacement plot of such vibration will as shown in Fig.1 (g). From the figure,

Or, 
Or,  ———- (1)
———- (1)
The above equation represents equation of motion in terms of a sine function. Since the particle covers an angular displacement of  in on complete cycle, we can write
in on complete cycle, we can write
 ———- (2)
———- (2)
Thus,  ———- (3)
———- (3)
Where, T is time period.
The frequency of Oscillation is given by,
 ———- (4)
———- (4)
Vectorial Representation
The mechanism of vibration can also be analyzed by making use of rotating vectors. The displacement equation is:

Velocity is,  ———- (5)
———- (5)
and acceleration is  ———- (6)
———- (6)
The above equation clearly shows that velocity leads displacement by 90 ° and acceleration leads displacement by 180 °. The vectorial representation of displacement, velocity and acceleration are shown in Fig.2.